2026年5月20日,全球最大规模具身智能真机评测平台 RoboChallenge Table30 榜单再次更新,星动纪元 Era0 登顶榜首。
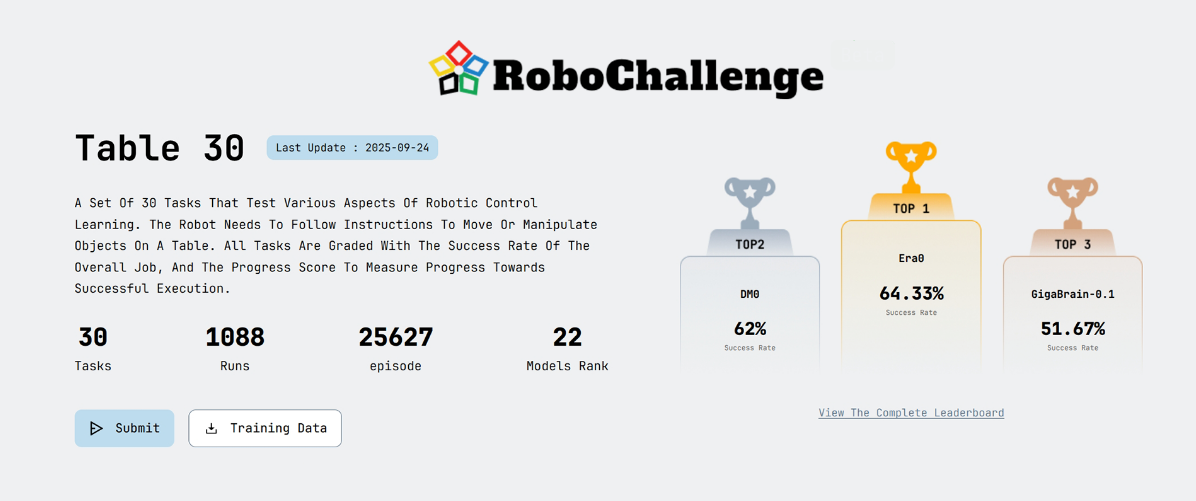
来自星动纪元(Robotera)的 Era0模型在 Table30 真机评测系列任务中,成功率(Success Rate)与过程分(Score)两项均位居参测模型首位,分别为 64.33% 与 76.34 分,综合排名位于榜单第一名,同时在17项桌面灵巧操作任务中斩获NO.1。
具身智能模型真机评测平台 RoboChallenge 旨在通过科学、标准化的评测体系,构建一个开放、公正、可复现的真实机器人"考场"。平台评测任务覆盖了桌面任务的关键难点、机器人本体类型、任务场景环境以及目标物体属性等多个维度,不仅关注任务是否完成,更对模型的完成任务过程中的能力进行系统评估。
星动纪元Era0实现了VLA与世界模型的深度融合,为模型的灵巧操作与场景适配能力奠定了坚实基础。
在本次评测中,Era0 在双臂协同、柔性物体、多视角与长时序等多个能力维度上均名列前茅,并在部分高难度任务中成为榜单中唯一取得非零成功率的模型,体现出其较强的任务覆盖能力与执行稳定性。
数据观察
双臂(bimanual / two-arm):Era0 在双臂类任务中表现突出。bimanual 类别成功率为 72.5%,two-arm 为 80%,均位居本次参测模型首位,领先于其他模型,显示出其在双臂协同操作场景下较强的能力。
柔性物体(softbody):Era0 在柔性物体类任务中取得 43.3% 的成功率,位列参测模型第一。该类任务整体难度较高,各模型成绩普遍偏低,Era0 相较 DM0(16.7%)与 Spirit-v1.5(13.3%)有一定优势,在非刚性物体操作方面具有相对较好的表现。
多视角和时序记忆(multiview / temporal):Era0 在 multiview 类任务成功率 68%,temporal 类任务成功率 63.3%,两项均为参测模型第一,Era0 在需要多视角和长时序的任务中表现稳定。
1.2 Era0 模型测评表现
在本次评测的 30 项任务中,Era0 以成功率 64.33%、过程分 76.34 位列参测模型第一。从任务维度分布来看,Era0 的能力覆盖面较为均衡,在多类场景下均展现出稳定的执行水平。
Era0 任务维度分析
我们以 Table30 评测集的 30 个任务为分析维度,进一步解析了 Era0 模型在不同任务上的表现。
擦桌子(wipe_the_table):
Era0 在此任务上取得 60% 的成功率,也是 Top8 模型中唯一实现非零成功率的模型。
做素食三明治(make_vegetarian_sandwich):
Era0 成功率为 20%,是 Top8 模型中唯一在此任务上取得非零成功率的模型。该任务涉及多步骤、真实食材处理和精细摆放,整体难度较高。
清理餐桌(clean_dining_table):
Era0 以 100% 的成功率在此任务中位居第一,该任务要求模型对桌面物体进行识别与连续清理。
双满分任务(SR 100% & Score 100):Era0 在以下两项任务中实现了成功率与过程得分的双满分表现:
将开瓶器放入抽屉(put_opener_in_drawer)
拧开水龙头(turn_on_faucet)
星动纪元团队夺冠经验分享
在本次 RoboChallenge Table30 评测中,星动纪元团队围绕数据、模型与工程三个层面持续迭代,以下是来自该团队的经验分享:
在数据层面:我们首先建立了一套量化的数据质检与处理 SOP,涵盖静止帧清理、异常数据筛查、元信息对齐及人工抽检等环节,从源头保障训练与评测输入数据的可靠性。在此基础上,我们积累了经过严格治理的大规模跨本体预训练动作数据,丰富的操作场景与跨本体训练策略共同强化了数据使用效率,使 Era0 在 Table30 任务上具备了更好的可迁移性。
在模型层面:Era0 在预训练阶段引入了视觉定位感知增强策略,训练样本同时包含高层语义信息与目标在图像中的具体位置标注,以此强化模型的视觉感知能力,而这一能力在本次评测中也得到了充分验证。针对 Table30 中擦桌子、浇植物等具有明显历史依赖或阶段依赖特征的任务,我们引入了短程时序记忆机制,使模型能够关注近期已发生的动作状态,有效规避了非马尔可夫场景下的动作循环问题。
在工程与推理层面:我们采用 15Hz 数据进行训练,并在训练完成后增加了基于训练数据的回放拟合验证环节,用于发现仅依赖损失曲线难以及时暴露的异常样本与噪声干扰。推理阶段,我们加入了动作插值以提升轨迹连续性,同时通过合理配置执行步长与动作执行时间保障操作精度,并对夹爪动作施加后处理以进一步提升执行稳定性。
此前,星动纪元具身模型已在权威具身世界模型测评 WorldArena 中斩获具身任务全球第一;在全球具身灵巧操作难度顶尖的真机赛事 Benjie's Humanoid Olympic Games 上击败 PI (Physical Intelligence),一举拿下剥橘子、开锁、翻袜子三项任务全球第一。
星动纪元始终以产业落地,在场景中创造生产力价值为最终目标推进具身模型技术研发,而非止步于赛场成绩。目前,公司具身技术优势已成功转化为物流分拣场景下的实际作业能力,在物流领域实现行业首个具身智能 PMF(产品市场匹配)落地。公司已与中国邮政、顺丰集团等头部物流企业达成深度合作,具身物流机器人在全国 5 个省市的 10 余个物流中心实现常态化运营。(张扬)
(新媒体责编:zhangyang1125)
声明:
1、凡本网注明“人民交通杂志”/人民交通网,所有自采新闻(含图片),如需授权转载应在授权范围内使用,并注明来源。
2、部分内容转自其他媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其他问题需要同本网联系的,请在30日内进行。电话:010-67683008
人民交通24小时值班手机:17801261553 商务合作:010-67683008转602
Copyright 人民交通杂志 All Rights Reserved 版权所有 复制必究 百度统计 地址:北京市丰台区南三环东路6号A座四层
增值电信业务经营许可证号:京B2-20201704 本刊法律顾问:北京京师(兰州)律师事务所 李大伟
 京公网安备 11010602130064号 京ICP备18014261号-2 广播电视节目制作经营许可证:(京)字第16597号
京公网安备 11010602130064号 京ICP备18014261号-2 广播电视节目制作经营许可证:(京)字第16597号