在智能交通与智慧城市快速发展的今天,计算资源的实时调度与高效利用已成为推动自动驾驶与车联网应用落地的核心挑战之一。近日,微云全息推出一项具有颠覆性意义的创新成果——深度强化学习驱动的协作车辆边缘计算(Collaborative Vehicular Edge Computing, CVEC)混合任务调度技术。该技术依托最先进的强化学习优化框架——Rainbow算法,在可行约束条件下实现动态车辆环境中的最优混合任务调度,以显著降低计算卸载的综合服务成本,并提升任务处理的实时性与稳定性。其不仅在学术和工程上均具有前沿价值,更有望在智能网联汽车、自动驾驶协同感知、智慧交通管理、车载多媒体计算等领域广泛应用,为未来的车路协同系统注入更高效的智能调度能力。
随着自动驾驶、车联网(V2X)以及智慧交通的快速普及,车辆逐渐具备了传感、计算与通信的综合能力。然而,自动驾驶算法、高清视频处理、实时地图构建、车载AI推理等任务对算力的需求持续攀升,单靠车辆自身的计算单元,往往难以满足毫秒级响应的应用要求。为此,业界引入了协作车辆边缘计算(CVEC)的理念,通过路侧单元(RSU)的边缘服务器以及周边志愿者车辆,构建一个动态、可扩展的计算资源池,实现任务的分布式处理与高效卸载。
然而,CVEC环境下的任务调度存在多重挑战。首先,参与计算的处理节点(无论是RSU还是志愿者车辆)计算能力差异巨大,形成了异构算力环境;其次,车对车(V2V)与车对基础设施(V2I)通信链路的时延与稳定性受车辆移动性影响显著,导致卸载路径与任务分配的动态变化;再次,任务的优先级、延迟敏感性、能耗要求等多种因素共同作用,使得传统静态调度算法难以兼顾全局最优与实时响应。
因此,深度强化学习(DRL)因其能够在未知环境中通过交互式学习不断优化决策策略,成为解决动态混合任务调度问题的理想方案。微云全息(NASDAQ:HOLO)在大量实验与仿真基础上,提出了结合Rainbow算法的深度强化学习框架,以突破传统方法在收敛速度、策略稳定性以及多目标优化方面的瓶颈。
微云全息该混合任务调度技术的核心目标,是在考虑车辆移动性、任务优先级、延迟要求与能耗约束的前提下,最小化全局的综合服务成本。综合服务成本被定义为任务优先级值与处理延迟和能耗加权和的乘积,这一公式能够有效反映任务在实际应用中的重要性与资源消耗情况。
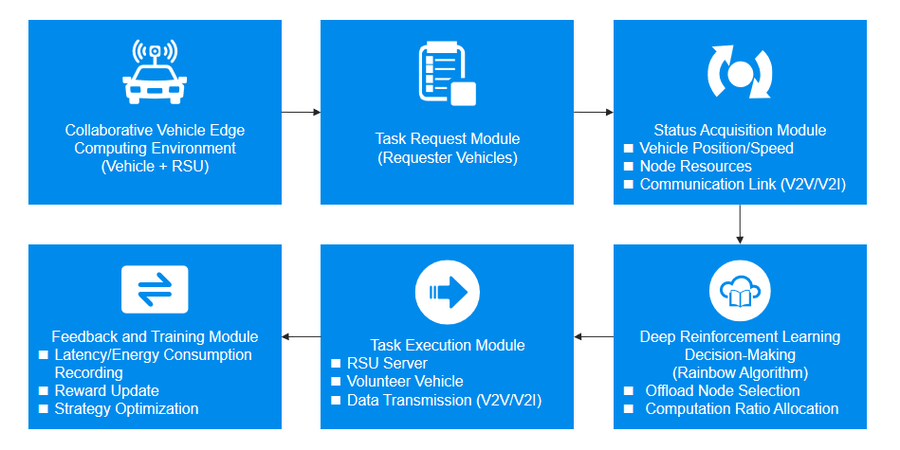
在调度过程中,车辆可能选择两种主要卸载方式:
V2I卸载:请求者车辆将任务卸载至路侧单元的边缘服务器,适合高计算能力、低延迟需求的任务处理;
V2V卸载:请求者车辆将任务卸载至附近的志愿者车辆,适合短时空邻近、计算量中等的任务执行。
为确保任务在严格的时延约束内完成,系统会根据车辆移动速度、相对位置、通信链路质量等动态因素,实时计算V2V和V2I的可用延迟阈值,从而约束调度决策的可行性。
Rainbow算法作为本系统的强化学习引擎,融合了多种DRL性能增强技术,包括双重Q学习(Double Q-learning)、优先经验回放(Prioritized Experience Replay)、分布式值函数(Distributional RL)、多步学习(n-step learning)、噪声网络(Noisy Nets)以及Dueling架构等。通过这一融合式改进,Rainbow能够在复杂的CVEC环境中实现更快的收敛、更稳定的策略生成,并显著提升对动态变化的适应能力。
微云全息该系统首先将CVEC环境抽象为一个马尔可夫决策过程(MDP),其中状态空间包括车辆位置、速度、剩余计算任务量、邻近可用处理节点的计算与通信特性等信息;动作空间对应不同的任务卸载决策,包括选择目标处理节点、分配计算比例、选择通信链路类型等;奖励函数则基于服务成本公式构建,通过惩罚高延迟、高能耗或违背时延约束的行为,鼓励系统选择低成本、高效率的调度策略。
系统周期性收集环境状态并输入到Rainbow模型中,模型输出当前最优的卸载策略。随后,任务被分配到最合适的计算节点,并通过V2V或V2I链路进行数据传输。在任务完成后,系统会将延迟与能耗等反馈信息更新到经验回放池中,并利用这些历史经验对Rainbow模型进行迭代优化,实现自适应的策略改进。
与传统的深度Q网络(DQN)不同,Rainbow在多个方面优化了学习过程。例如,分布式值函数能够捕捉回报的不确定性分布,而不仅仅是期望值,从而让调度策略在波动性较大的环境中更加稳健;优先经验回放机制则确保模型优先学习那些对策略改进最有价值的经验样本,加速了收敛速度;而噪声网络的引入,则使模型能够在训练后期保持一定的探索性,避免陷入局部最优解。
随着智能交通与车联网产业的持续发展,车辆不仅是交通工具,更将成为分布式计算网络中的重要节点。微云全息(NASDAQ:HOLO)深度强化学习驱动的混合任务调度技术,将在自动驾驶协同感知、智慧交通信号优化、车载娱乐与多媒体处理以及应急事件处理等多个领域释放价值。
总体来看,微云全息该技术在协作车辆边缘计算中的混合任务调度问题上展示了显著的性能优势,为动态环境下的资源优化提供了可行方案。未来,通过进一步的算法优化与模型训练,有望在复杂多变的实际交通场景中实现更高效、稳定的调度效果,并为智能交通系统的持续发展提供技术支撑。
【免责声明:该文章系我网转载,旨在为读者提供更多信息资讯。所涉内容不构成投资、消费建议,仅供读者参考。】
(新媒体责编:wa123)
声明:
1、凡本网注明“人民交通杂志”/人民交通网,所有自采新闻(含图片),如需授权转载应在授权范围内使用,并注明来源。
2、部分内容转自其他媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其他问题需要同本网联系的,请在30日内进行。电话:010-67683008
人民交通24小时值班手机:17801261553 商务合作:010-67683008转602
Copyright 人民交通杂志 All Rights Reserved 版权所有 复制必究 百度统计 地址:北京市丰台区南三环东路6号A座四层
增值电信业务经营许可证号:京B2-20201704 本刊法律顾问:北京京师(兰州)律师事务所 李大伟
 京公网安备 11010602130064号 京ICP备18014261号-2 广播电视节目制作经营许可证:(京)字第16597号
京公网安备 11010602130064号 京ICP备18014261号-2 广播电视节目制作经营许可证:(京)字第16597号